Do we REALLY need an external world model? 🤔
Do we REALLY need an external world model? 🤔
Standard approaches often rely on heavy external simulators.
We agree with the view: The Agent itself is the World Model.
🌍 How to align agentic world models via experience learning?
We are excited to introduce our new work: “Aligning Agentic World Models via Knowledgeable Experience Learning”(WorldMind)🚀
🚧The Problem: LLMs possess vast semantic knowledge but lack physical grounding. → Ask for a plan: It sounds logical. → Execute it: It fails physically (e.g., trying to slice without a knife). 😵💫
The agent knows what to do, but not how physical laws constrain it.
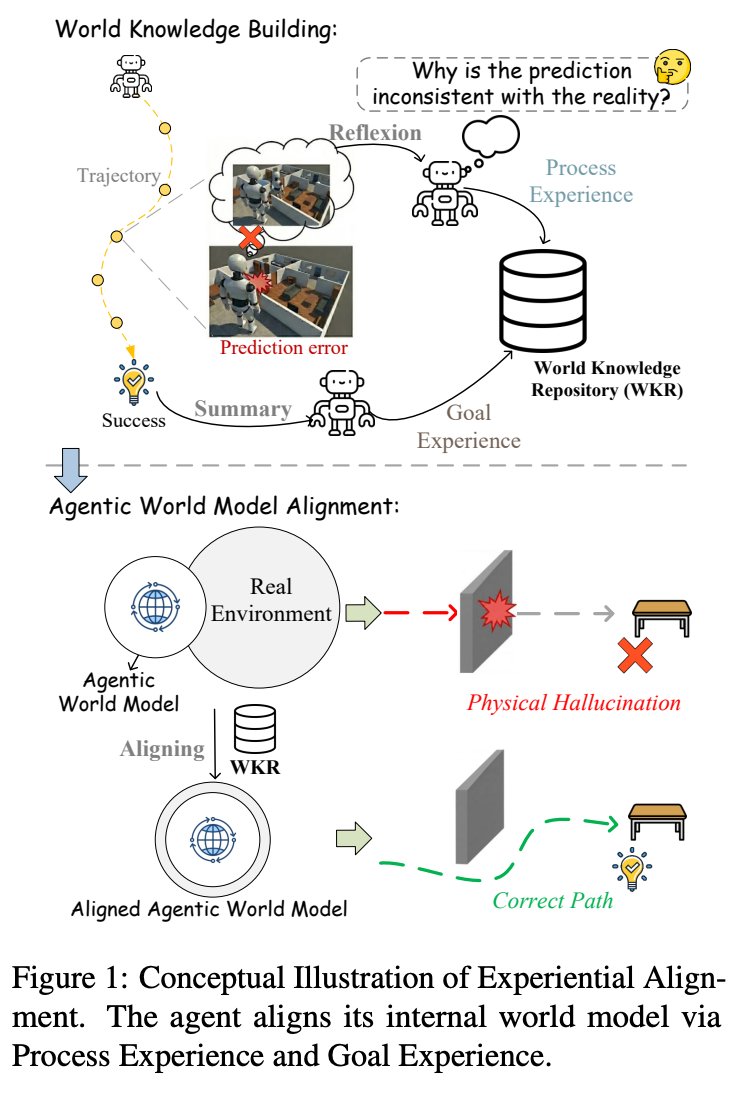
💡The Solution: WorldMind
We bridge the gap between high-level reasoning and physical reality through:
🌍 Agentic World Model: Instead of external engines, we activate the agent’s internal ability to simulate environmental dynamics to guide planning.
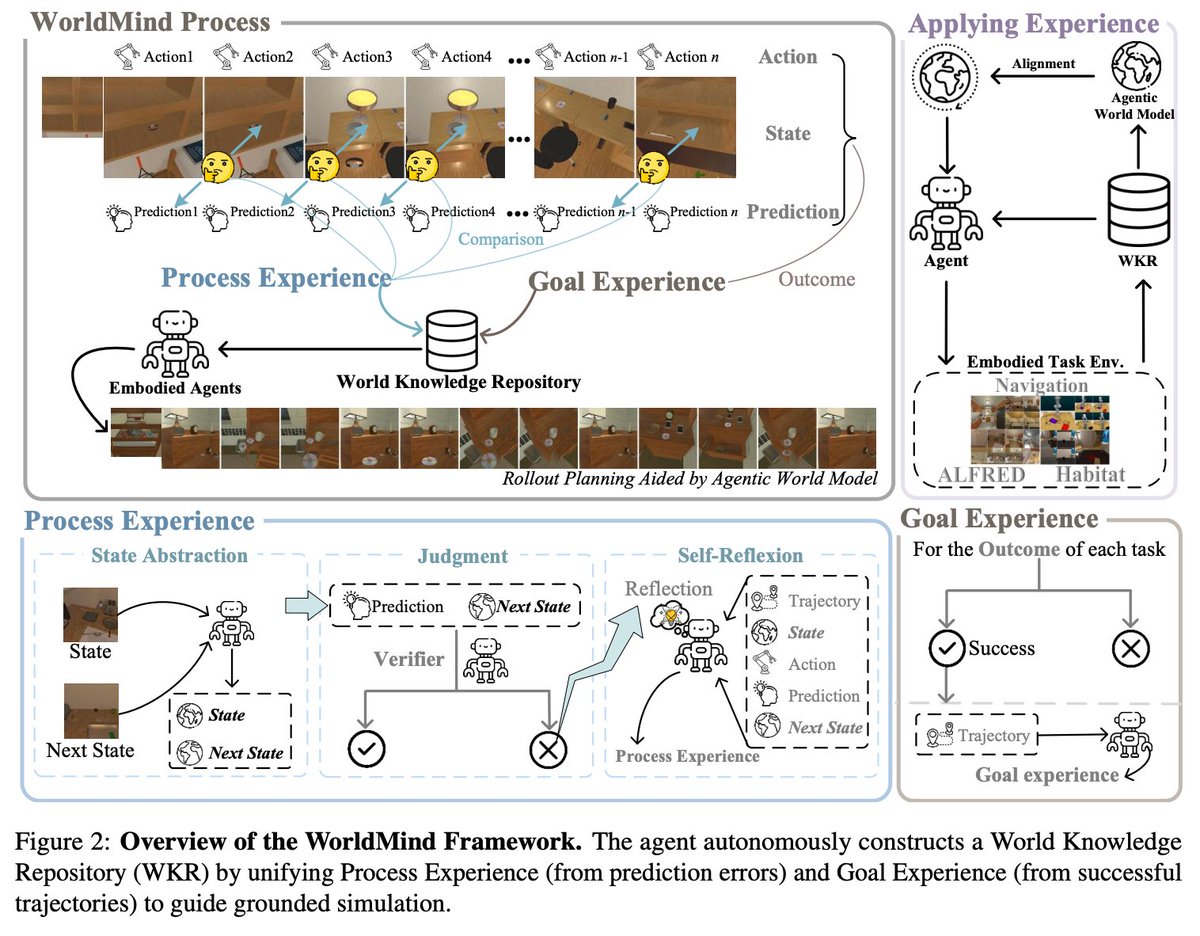
🔹 Online Experience Learning: Eliminates the need for costly fine-tuning or retraining. 🔹 Alignment via World Knowledge: Autonomously builds a World Knowledge Repository (WKR) to ground the agent.
This unifies: • Process Experience: Learning from step-level prediction failures ❌ • Goal Experience: Distilling shortcuts from successful trajectories ✅
🚀 Key Features:
✅ Training-Free: Aligns agents via online experience learning.
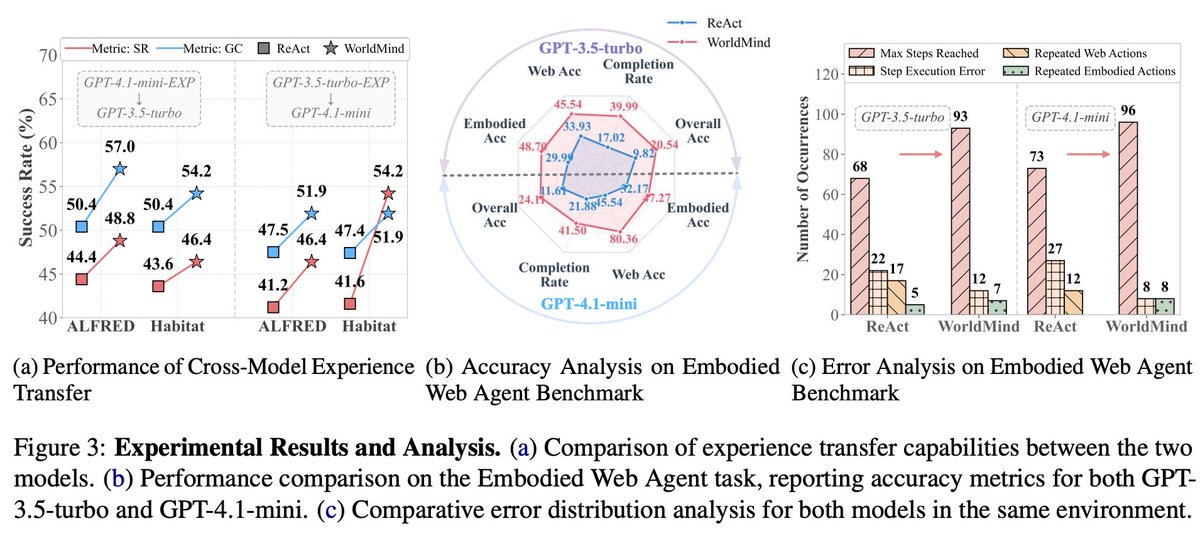
✨ Superior Performance: improvements on EB-ALFRED & EB-Habitat.
🔗 Project Page: https://zjunlp.github.io/WorldMind/ 📄 Paper: https://huggingface.co/papers/2601.13247
Our current method is limited by today’s foundation models and cannot yet support reliable long-horizon planning.
Looking ahead, as model capacity and memory modules continue to improve, we believe agents will gradually internalize world models and achieve robust long-term embodied decision-making.
EmbodiedAI MultimodalAgent ExperienceLearning Alignment WorldModels LLM Robotics AgenticAI NLP WorldMind
🔗 원본 링크
미디어