Zhenjun Zhao (@zhenjun_zhao)
2026-01-28 | ❤️ 104 | 🔁 14
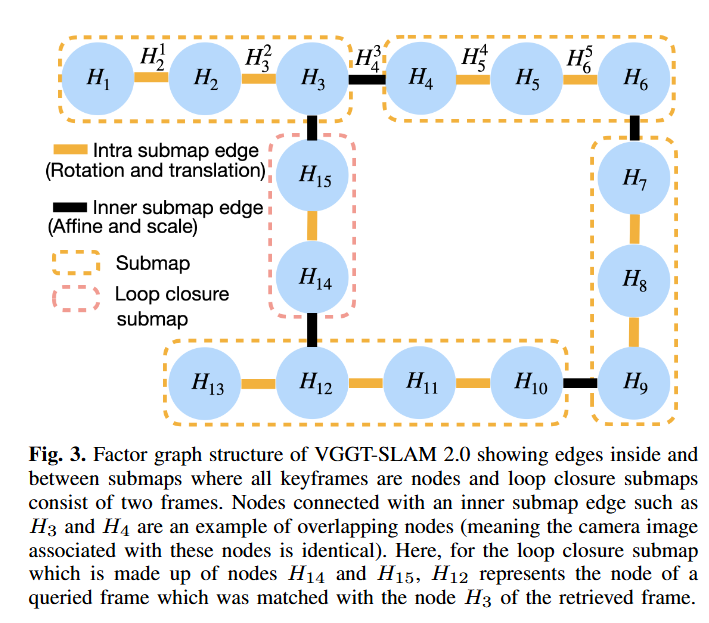
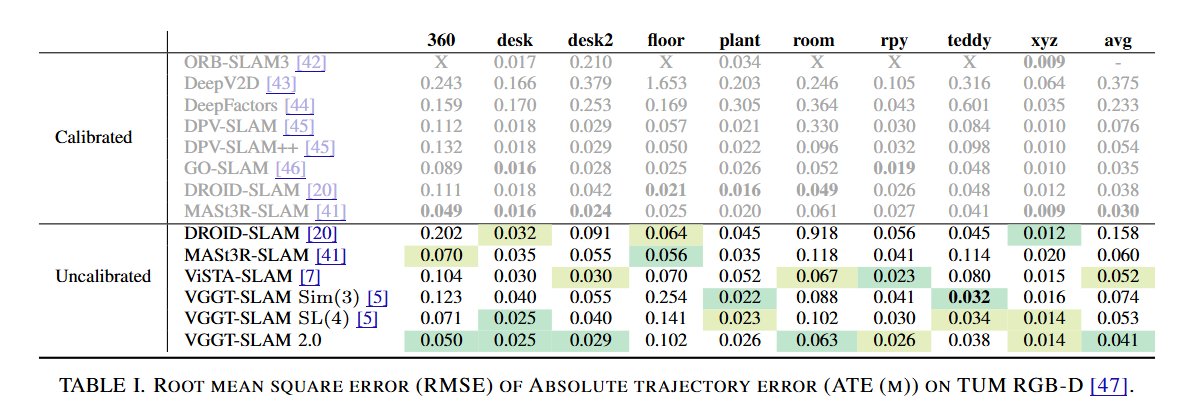
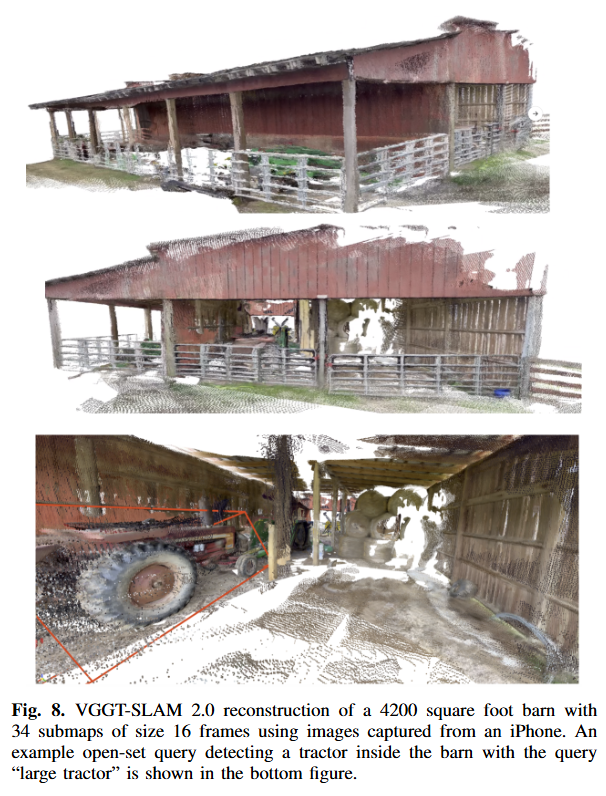
VGGT-SLAM 2.0: Real time Dense Feed-forward Scene Reconstruction
Dominic Maggio, @lucacarlone1
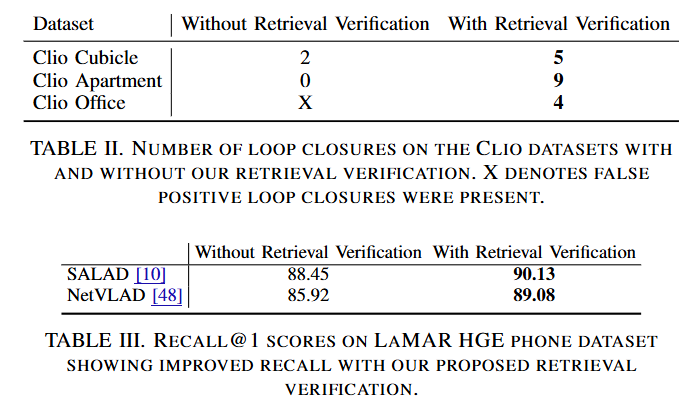
tl;dr: no 15 DoF alignment in VGGT-SLAM; keyframes as nodes+intra-/inter-submap edges→factor graph; attention layers in VGGT→image retrieval verification
https://t.co/jdDwVhqNr6 https://t.co/wmGqcX9UaD
미디어