Niko Sünderhauf (@nikoSuenderhauf)
2024-11-04 | ❤️ 55 | 🔁 6
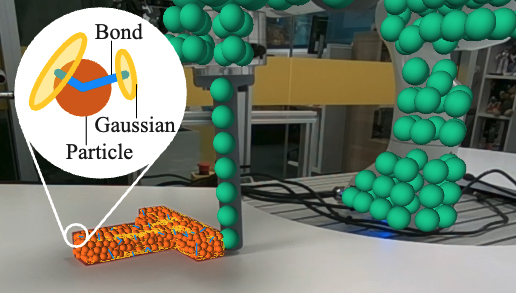
Very proud my team is back at Corl2024 with an oral presentation! @jadachakra will present “Physically Embodied GaussianSplatting” https://embodied-gaussians.github.io/ - our worldmodel for robots that can make forward predictions, capture physics, and even deal with deformable objects. https://x.com/nikoSuenderhauf/status/1853301292875325669/photo/1
미디어