MrNeRF (@janusch_patas)
2024-11-20 | ❤️ 88 | 🔁 11
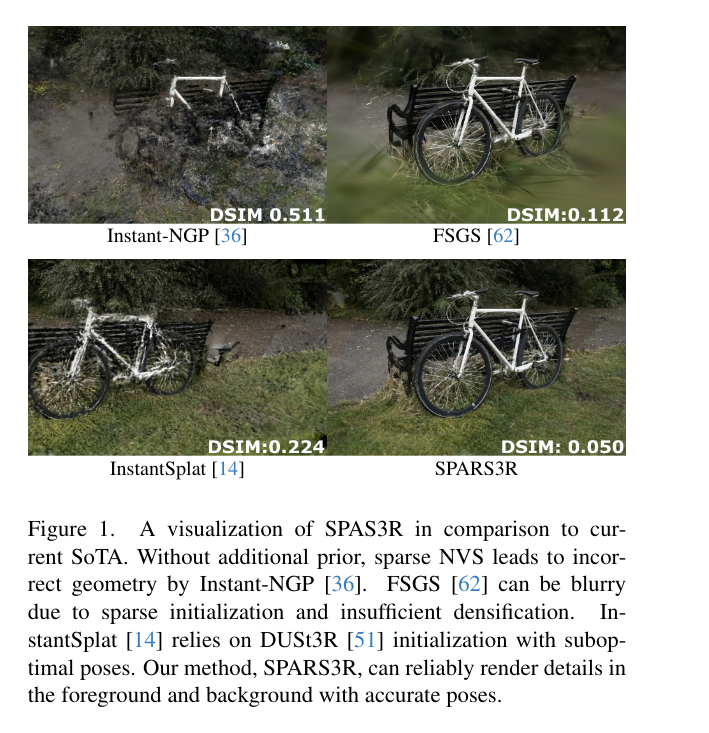
SPARS3R: Semantic Prior Alignment and Regularization for Sparse 3D Reconstruction
Contributions:
-
We propose a Gloabl Fusion Alignment approach, which transforms a prior dense point cloud onto a reference SfM sparse point cloud, putting dense initialization and accurate camera poses in the same coordinate frame.
-
To address outliers that cannot be aligned accurately due to depth discrepancies, we propose a Semantic Outlier Alignment step. This step extracts semantically similar regions around the outliers to perform local alignment, resulting in a dense point cloud with minimum transformation error.
-
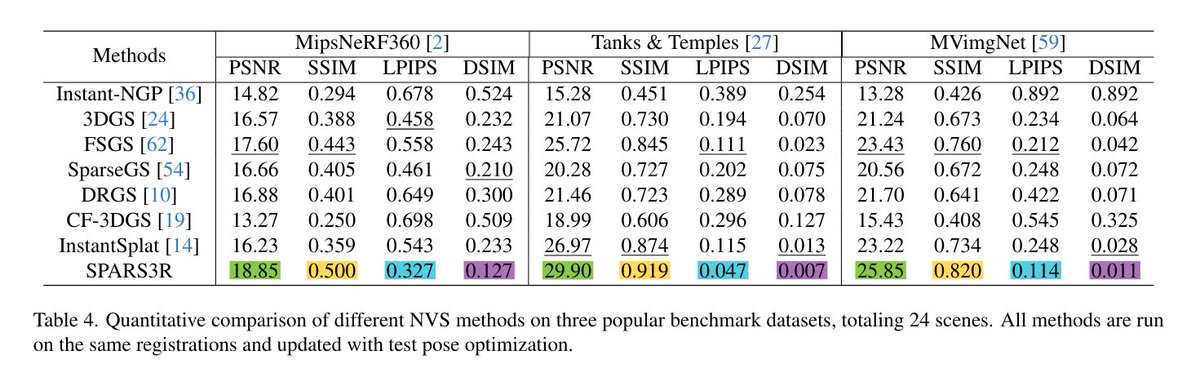
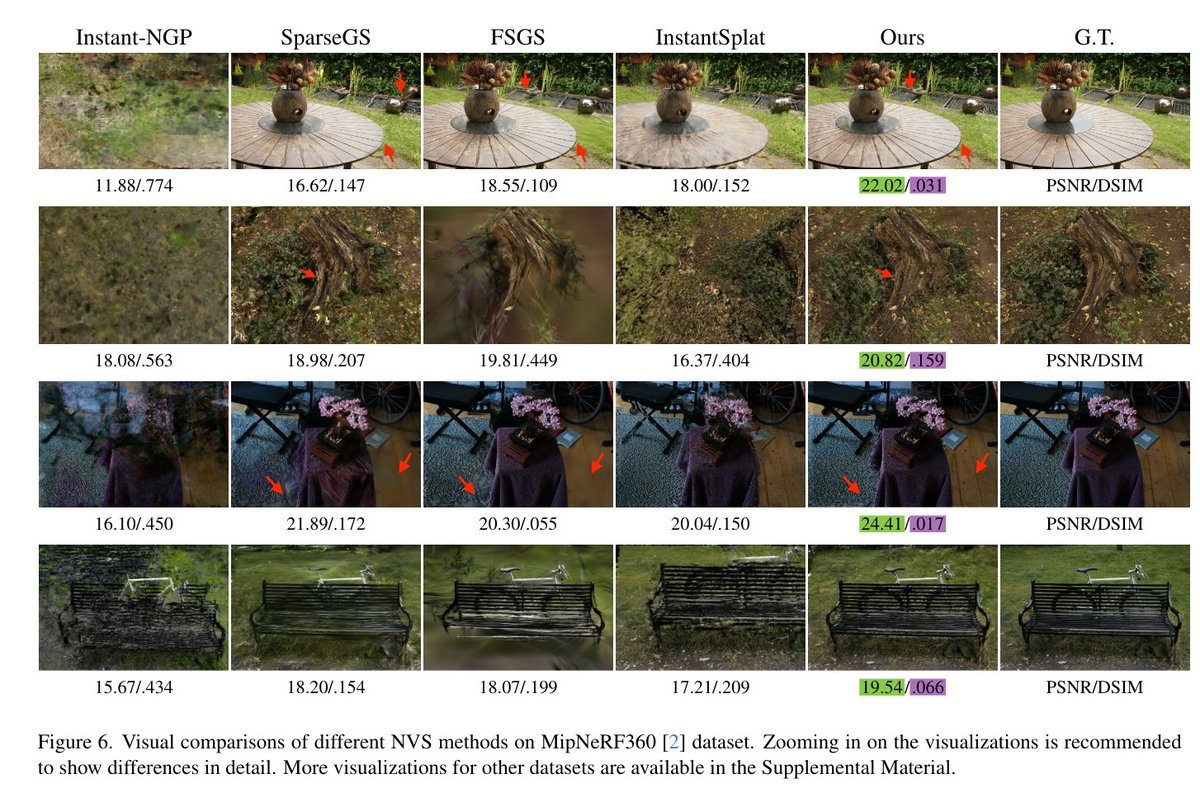
We evaluate the overall method, SPARS3R, on three popular benchmark datasets and find significant quantitative and visual improvements compared to current SoTA methods.
미디어