rsasaki0109 (@rsasaki0109)
2026-01-29 | ❤️ 136 | 🔁 17
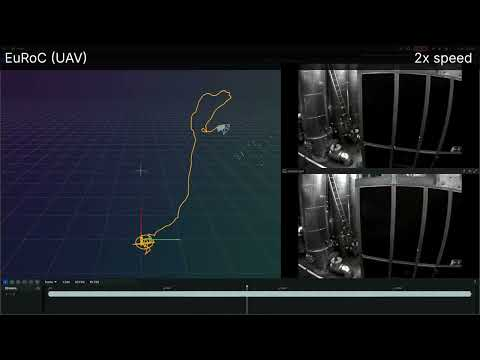
RS-VIO Rust Stereo Visual-Inertial Odometry https://t.co/jMPT0Rjqz5 Features
- Patch-based stereo feature tracking: Multi-scale optical flow tracking using 52-point patterns for robust feature correspondence between stereo pairs.
- Sliding window bundle adjustment: Joint optimization of camera poses and 3D map points using apex-solver with configurable window size.
- PnP motion tracking: Perspective-n-Point pose estimation for inter-frame tracking between keyframes.
- Keyframe selection: Automatic keyframe selection based on translation and rotation thresholds.
- Multi-camera model support: Supports pinhole-radtan and EUCM camera models with distortion handling, more camera models can be integrated easily.
- Dataset support: Players for EuRoC, TUM-VI, and 4Seasons datasets with configurable parameters.
- 3D visualization: Real-time visualization of trajectories, map points, and camera frustums using Rerun.
미디어