MrNeRF (@janusch_patas)
2024-08-28 | ❤️ 70 | 🔁 14
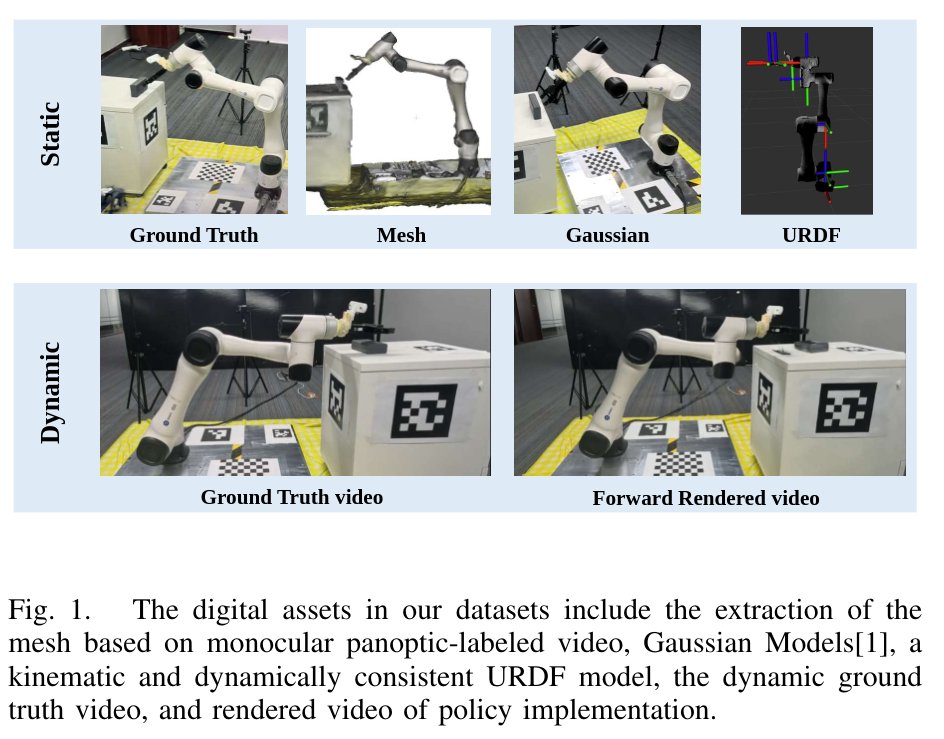
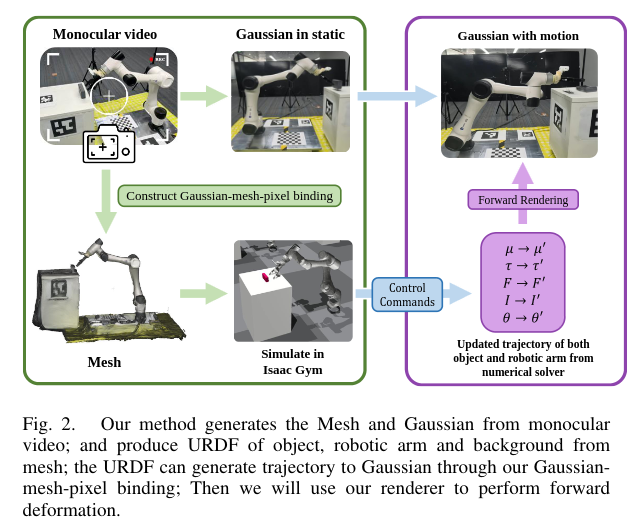
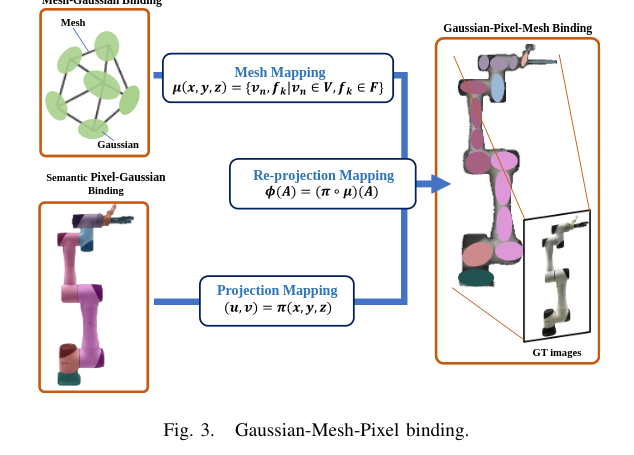
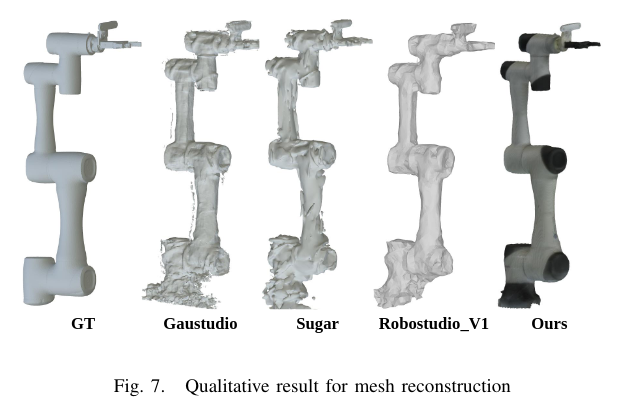
Robo-GS: A Physics Consistent Spatial-Temporal Model for Robotic Arm with Hybrid Representation
Paper: https://arxiv.org/abs/2408.14873 Project: https://www.robostudioapp.com/ YouTube: https://www.youtube.com/watch?v=Aq2-2EW6JBk https://x.com/janusch_patas/status/1828685722699653517/photo/1
미디어