rsasaki0109 (@rsasaki0109)
2025-12-10 | ❤️ 127 | 🔁 17
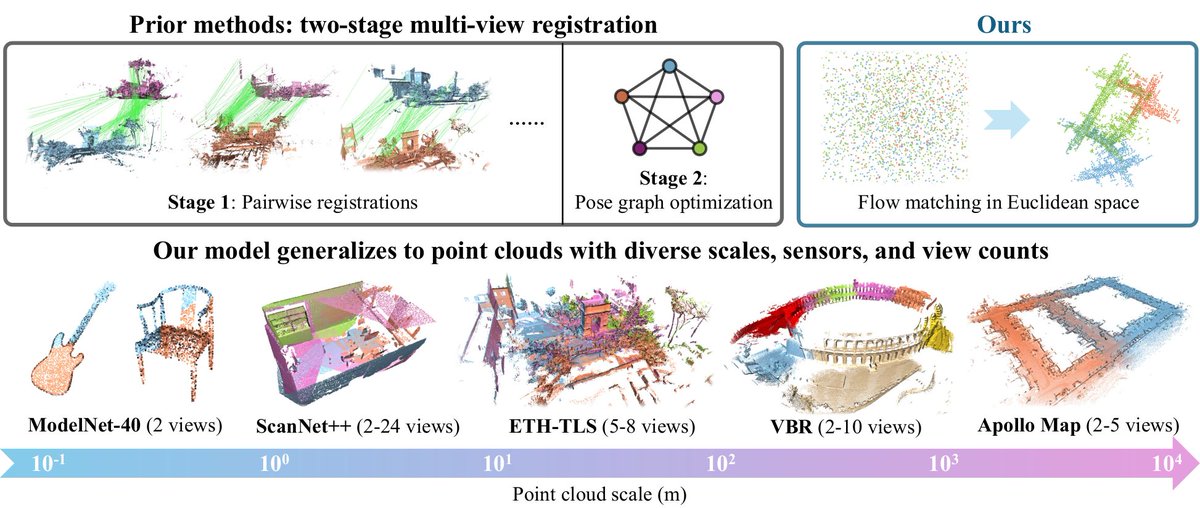
Register Any Point: Scaling 3D Point Cloud Registration by Flow Matching https://register-any-point.github.io/ Our method for scalable multi-view point cloud registration. To register multiple unposed point clouds, prior work typically first performs correspondence matching and then optimizes a pose graph (top-left). In contrast, we introduce a single-stage model that directly generates the registered point cloud via flow matching in Euclidean space (top-right), bypassing the need for explicit correspondence matching and pose graph optimization. Our model generalizes across diverse point cloud data from object-centric, indoor, and outdoor scenarios at scan, sub-map, and map levels (bottom)
🔗 원본 링크
미디어