MrNeRF (@janusch_patas)
2024-09-05 | ❤️ 45 | 🔁 11
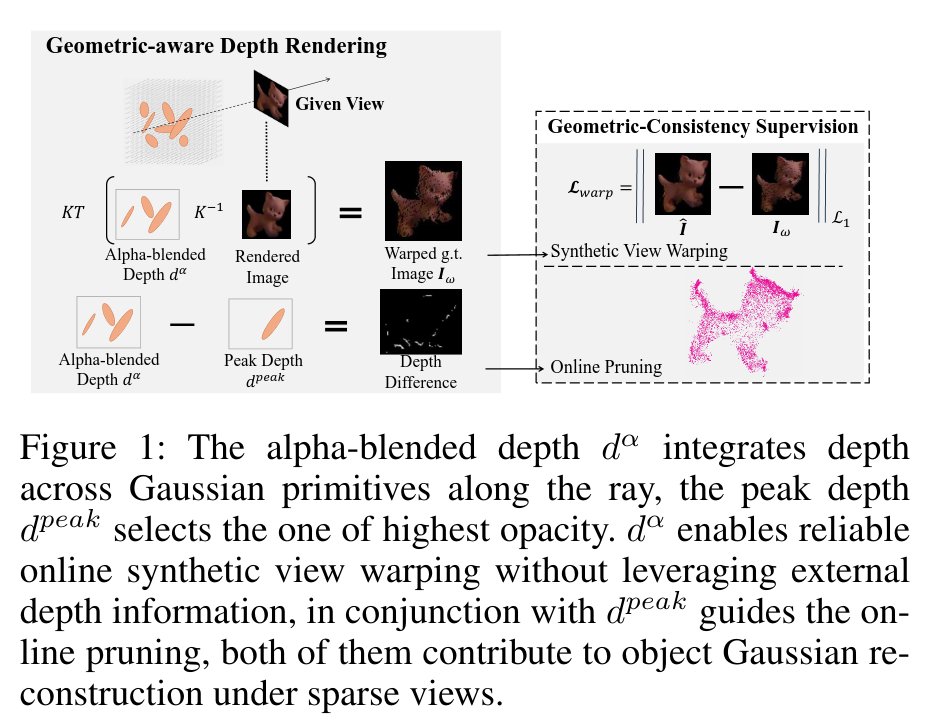
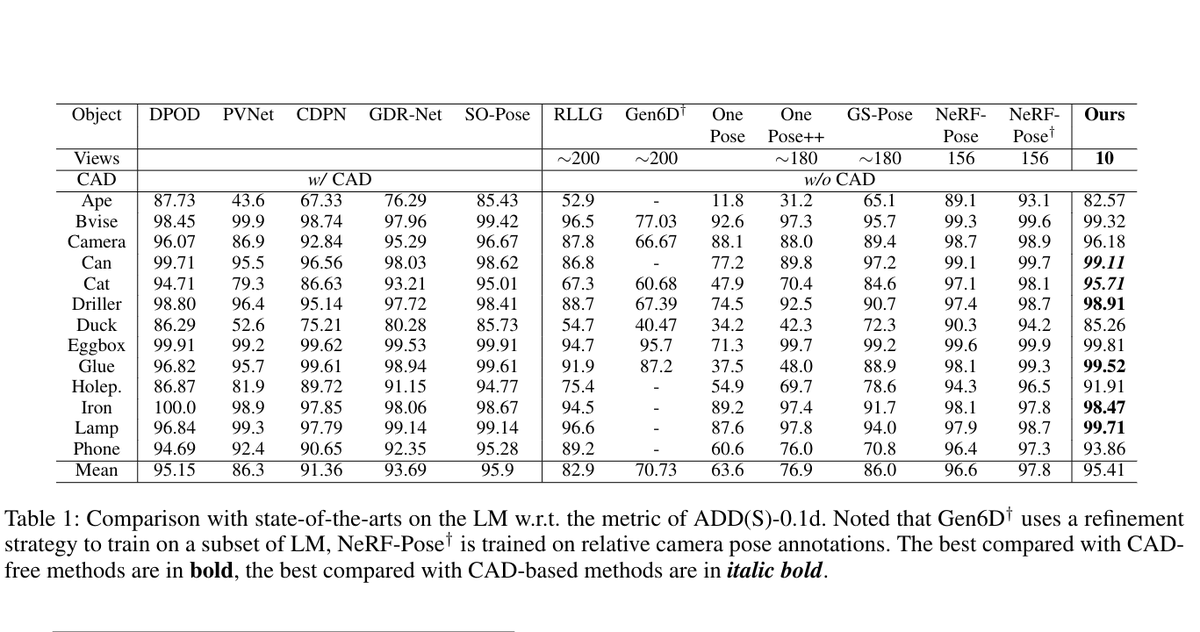
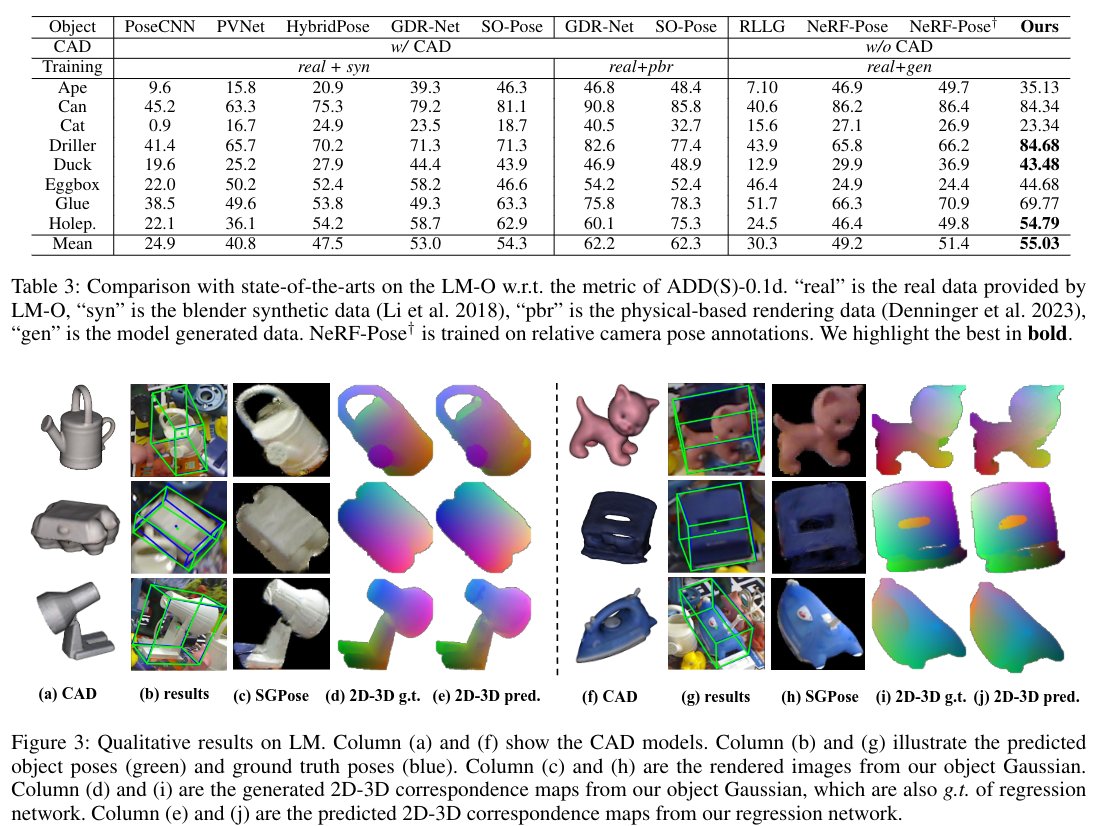
Object Gaussian for Monocular 6D Pose Estimation from Sparse Views
Paper: https://arxiv.org/abs/2409.02581 https://x.com/janusch_patas/status/1831598371565384188/photo/1
미디어

2024-09-05 | ❤️ 45 | 🔁 11
Object Gaussian for Monocular 6D Pose Estimation from Sparse Views
Paper: https://arxiv.org/abs/2409.02581 https://x.com/janusch_patas/status/1831598371565384188/photo/1