Xiaojian Ma (@jeasinema)
2024-11-29 | ❤️ 115 | 🔁 24
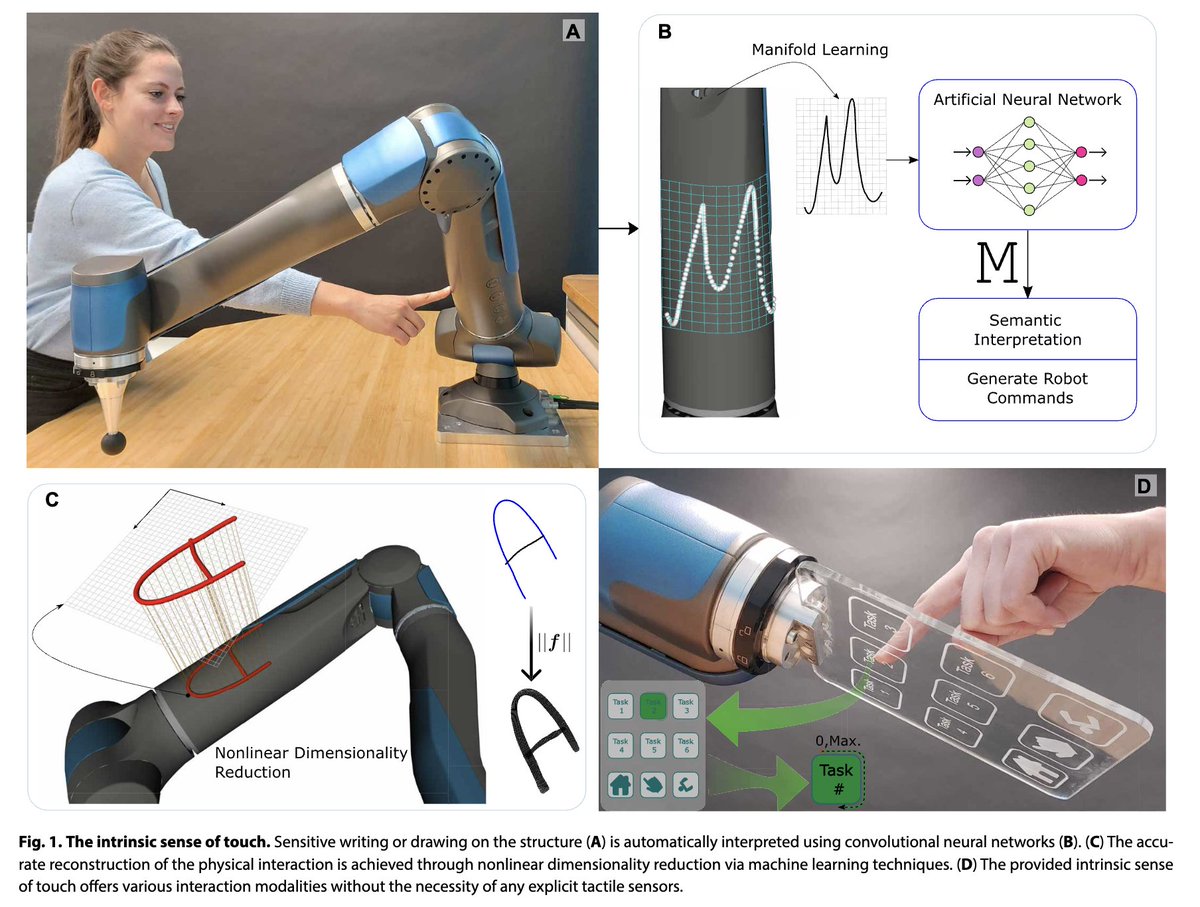
🤯 Incredible demos! TL;DR: Leveraging high-resolution joint-force-torque sensing for tactile feedback instead of traditional artificial skin or tactile sensors 🚀🚀🚀
https://t.co/NG6ZzXSo3q https://x.com/jeasinema/status/1862365329370087528/photo/1
미디어