Chris Paxton (@chris_j_paxton)
2025-01-14 | ❤️ 142 | 🔁 23
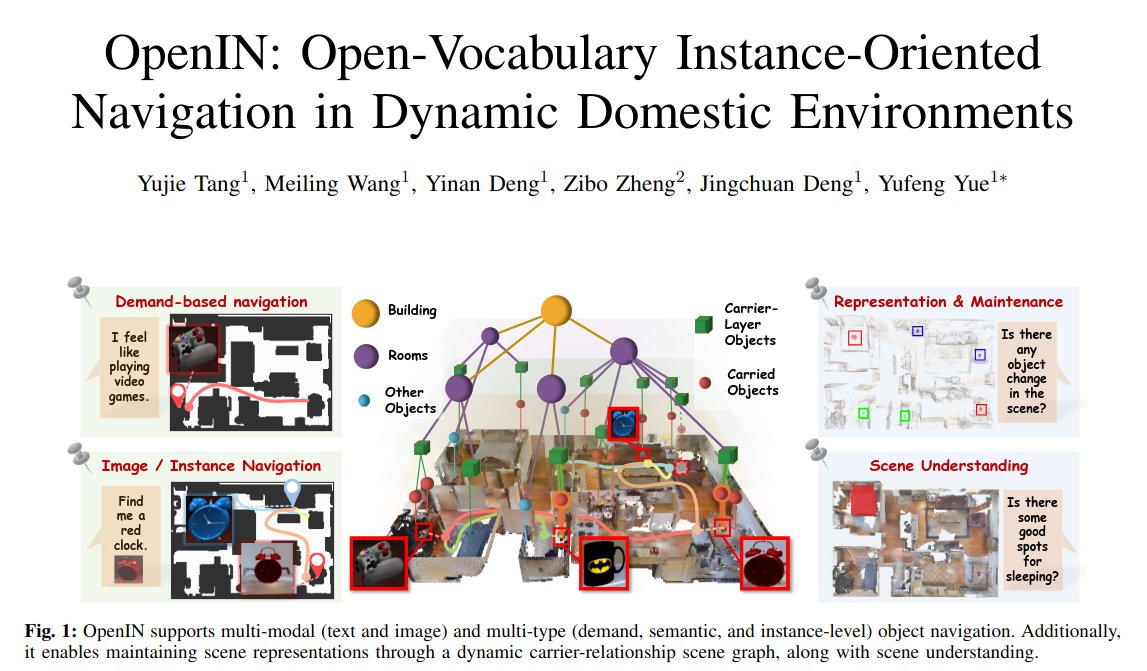
Dynamically update scene graphs as an agent explores and moves around the world, in order to create robots which can function in human environments like homes.
This creates a carrier-relation scene graph (CRSG) as the underlying representation, which lets it find and move to moved targets.
미디어
🔗 Related
Auto-generated - needs manual review