pfung (@philfung)
2025-05-16 | ❤️ 2 | 🔁 0
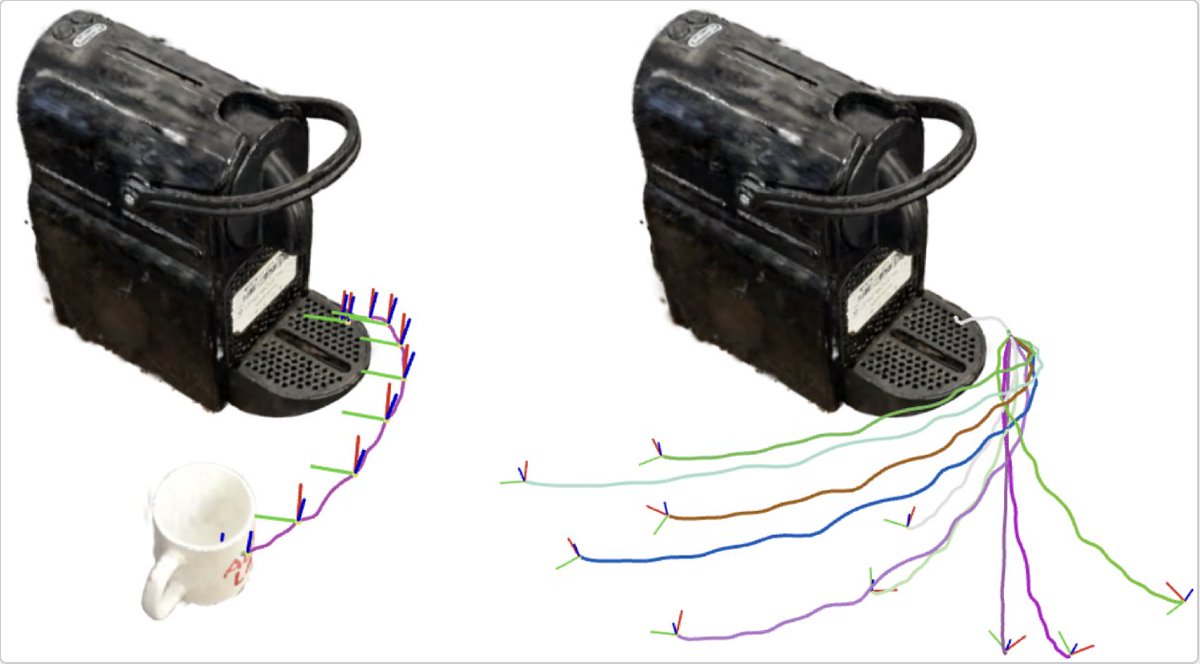
cool approach: This Berkeley paper ditched simulator physics completely. The simulator is only for “rendering”. (i.e. gen more realistic video data based on splats and inv. kinematics only) https://x.com/philfung/status/1923485144125759770/photo/1
🔗 원본 링크
미디어
🔗 Related
Auto-generated - needs manual review
인용 트윗
Max Fu (@letian_fu)
Tired of teleoperating your robots? We built a way to scale robot datasets without teleop, dynamic simulation, or even robot hardware. Just one smartphone scan + one human hand demo video → thousands of diverse robot trajectories. Trainable by diffusion policy and VLA models as-is. Introducing: Real2Render2Real 👉 https://t.co/lRHspvFpwy
🎬 영상
{kind=link}